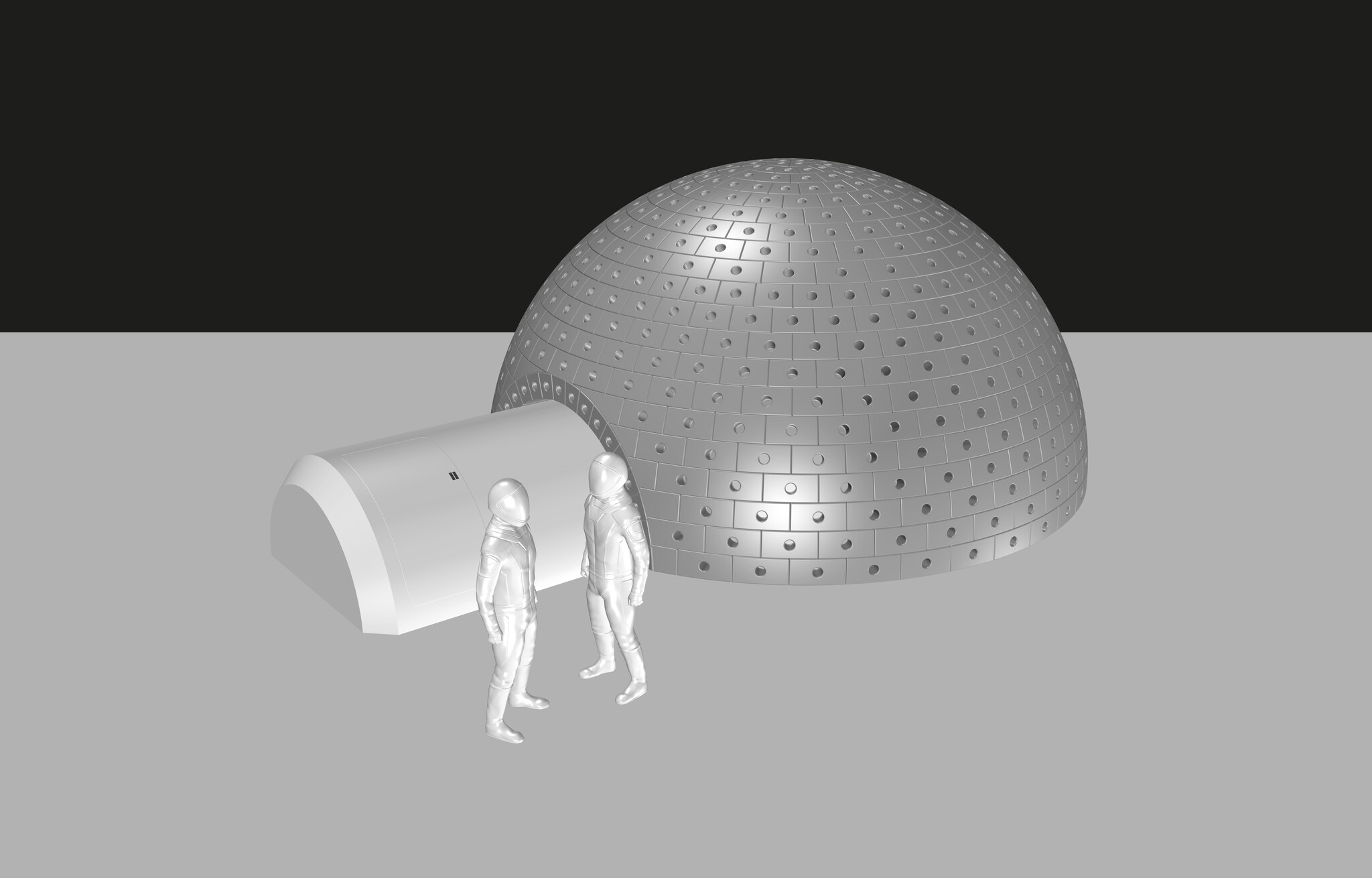
Im Mittelpunkt dieser Arbeit steht die Realisierung einer Forschungsstation auf dem Mond. Das dafür entwickelte Robotersystem TRITEC nutzt ausschließlich die lokalen Ressourcen Mondstaub und Sonnenlicht. In den solaren Sinterstationen werden Sonnenstrahlen fokussiert um individuelle Bausteine aus Mondstaub herzustellen. Diese werden anschließend von kletternden Robotern zu einer schützenden sphärischen Hülle zusammengesetzt. Die einzelnen Maschinen können dabei unabhängig voneinander arbeiten oder über ein Schnittstellensystem miteinander kombiniert werden.
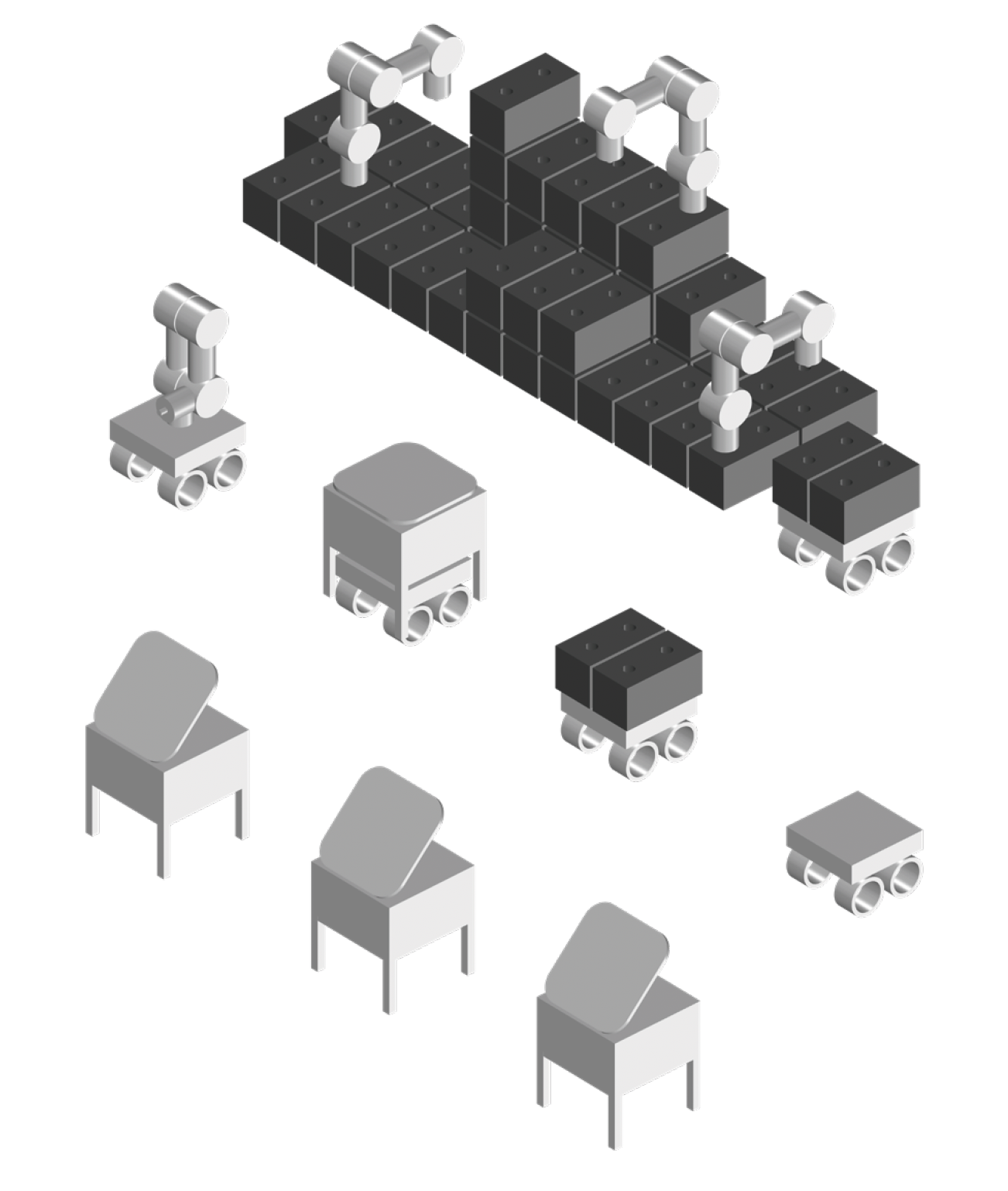
Mit der mobilen Plattform T–02 lassen sich Bausteine, Baumaschinen und diverse Materialien auf dem Mond transportieren. Das vierrädrige Multifunktionsgerät verfügt über eine Ladefläche, die sowohl einzeln als auch in Kombination mit dem Roboterarm T–03 verwendet werden kann. Durch die Kombination aus einem verstellbaren Fahrwerk und einem elektrischen Allradantrieb ist das Vehikel enorm flexibel. Zusammengeklappt lässt sich ein minimales Transportvolumen erreichen und ausgefahren ermöglicht das Fahrgestell eine hohe Stabilität beim Arbeiten.
Masterarbeit 2021/2022 | Tony Jankowski
Betreuung: Prof. Nils Krüger, Prof. Dr. Jörg Petruschat
Mit der solaren Sinterstation T–01 lässt sich loser Mondstaub in feste Bausteine umwandeln. Für den vollautomatisch ablaufenden solaren Sinterprozess werden ausschließlich gleichbleibende Sonnenverhältnisse und ausreichend Mondregolith benötigt. Durch das schichtweise Herstellungsverfahren sind der Bausteingeometrie keine Grenzen gesetzt. Die Photovoltaikmodule ermöglichen ein vollkommen autarkes Arbeiten – und das rund um die Uhr.
Die Endeffektoren des kinematischen Arms bestehen aus zylindrischen Stiften, deren Enden sich beim Eindrehen einer Gewindestange im Inneren spreizen. Das passende Gegenstück ist ein Loch in Form eines leichten Kegelstumpfes, welches sich in den einzelnen Bauelementen und in der Mitte der fahrenden Plattform TRITEC02 finden lässt. Auf diese Art und Weise kann sich der Roboterarm TRITEC03 auf der mobilen Plattform befestigen und von dort aus einzelne gesinterte Bauelemente von einem Ort zum anderen Ort versetzen. Alternativ zum Bewegen der Bauelemente kann sich der Roboterarm auch auf bereits zusammengefügten Strukturen fortbewegen und die Löcher als Infrastruktur nutzen.