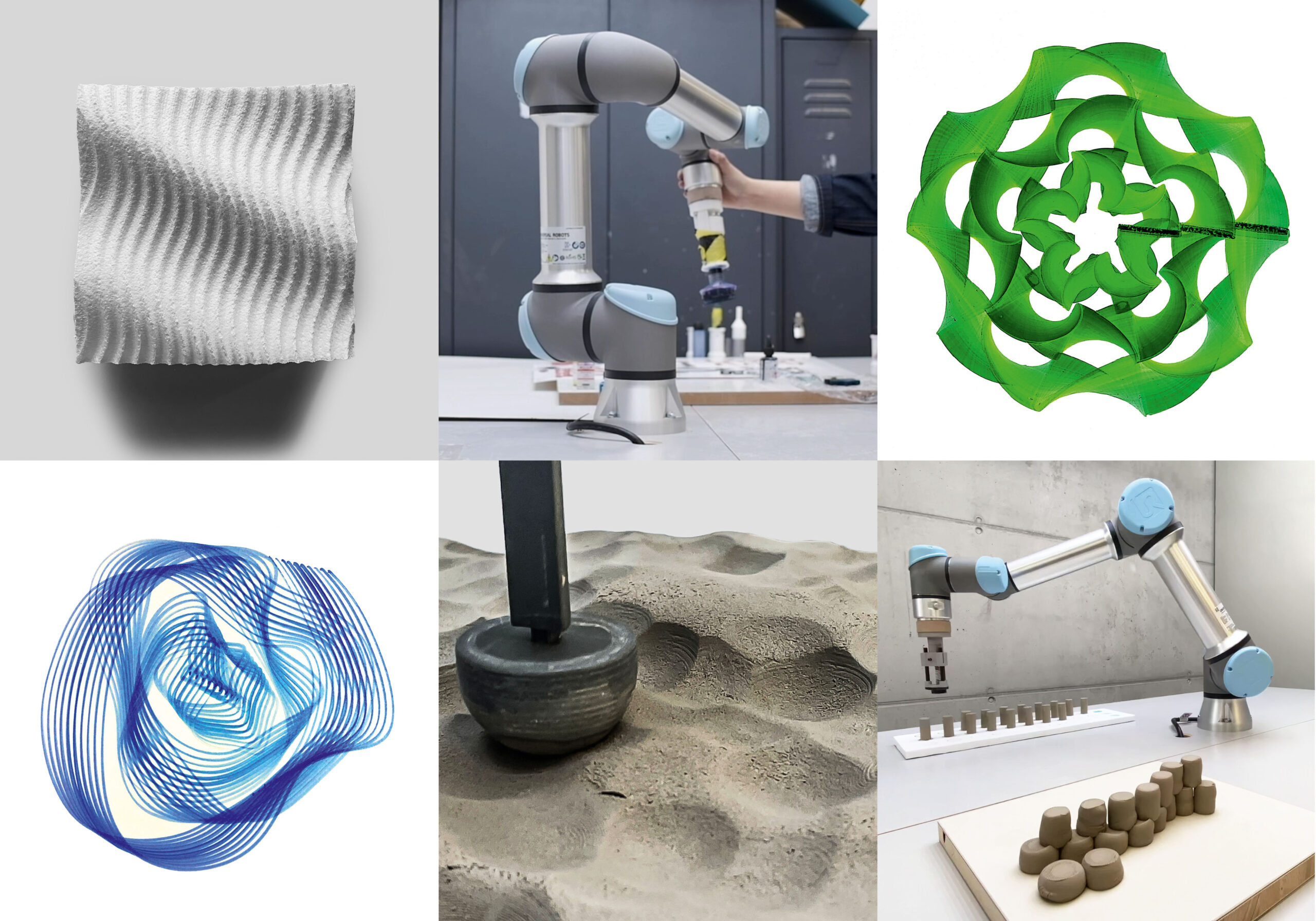

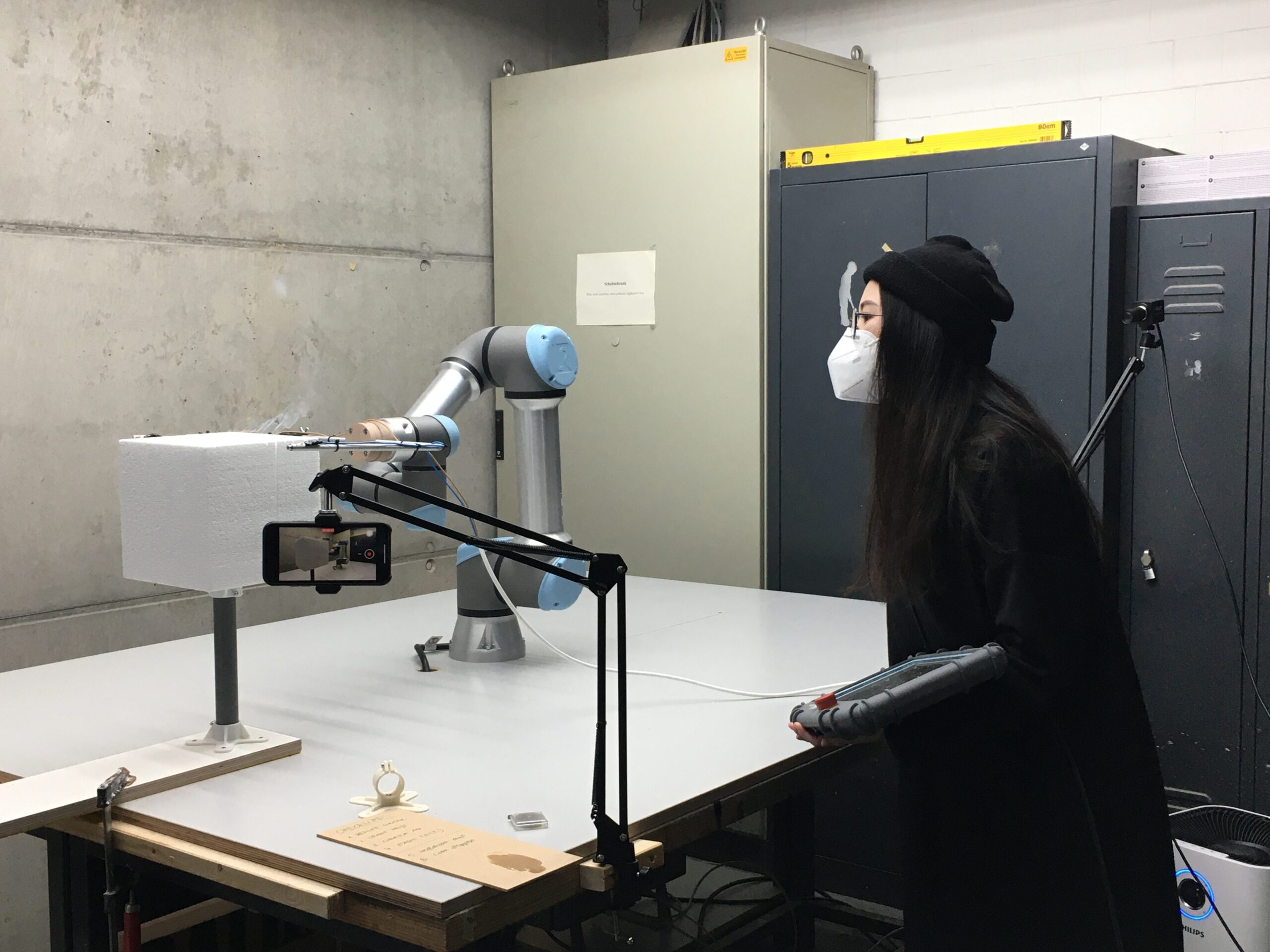
Malwerkzeuge



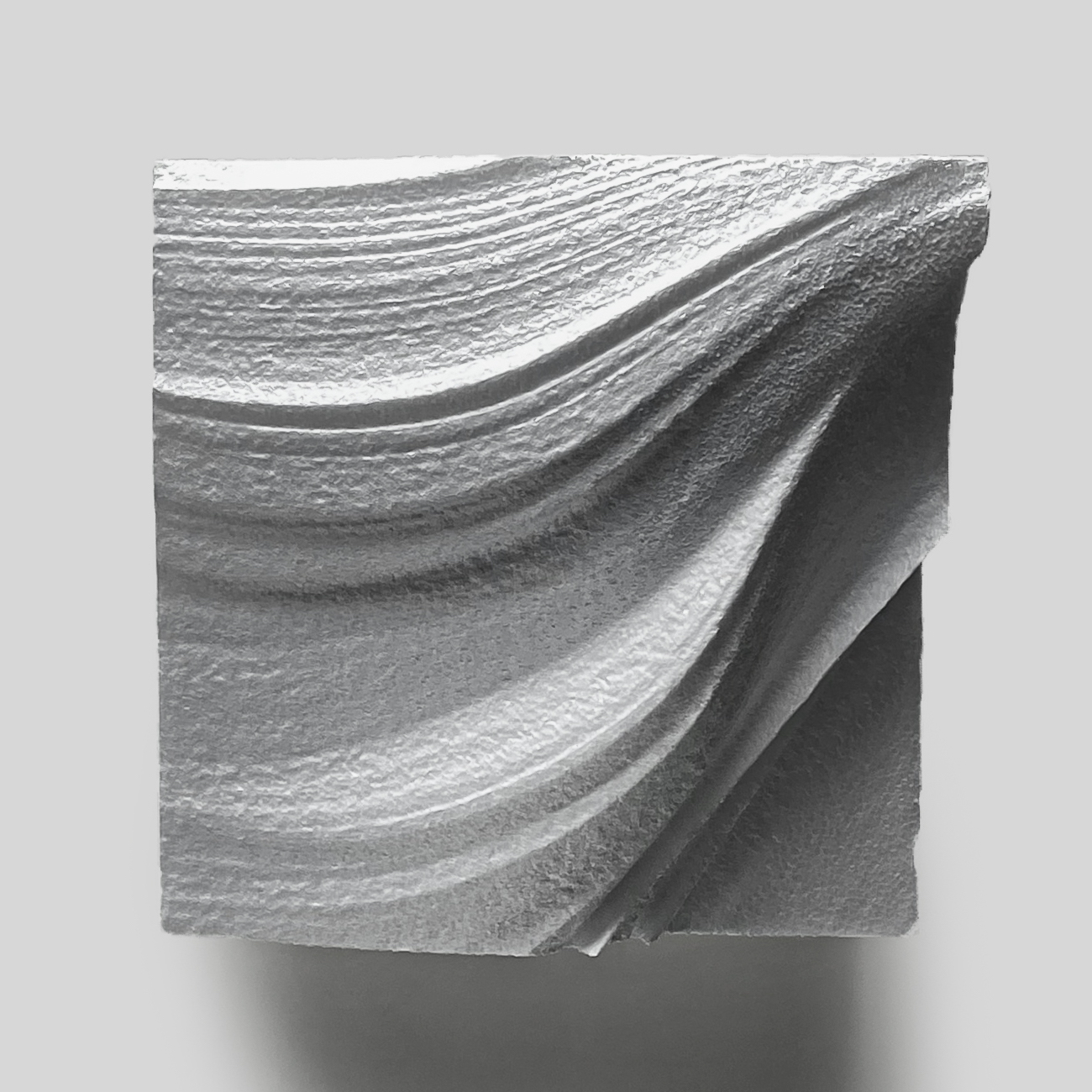
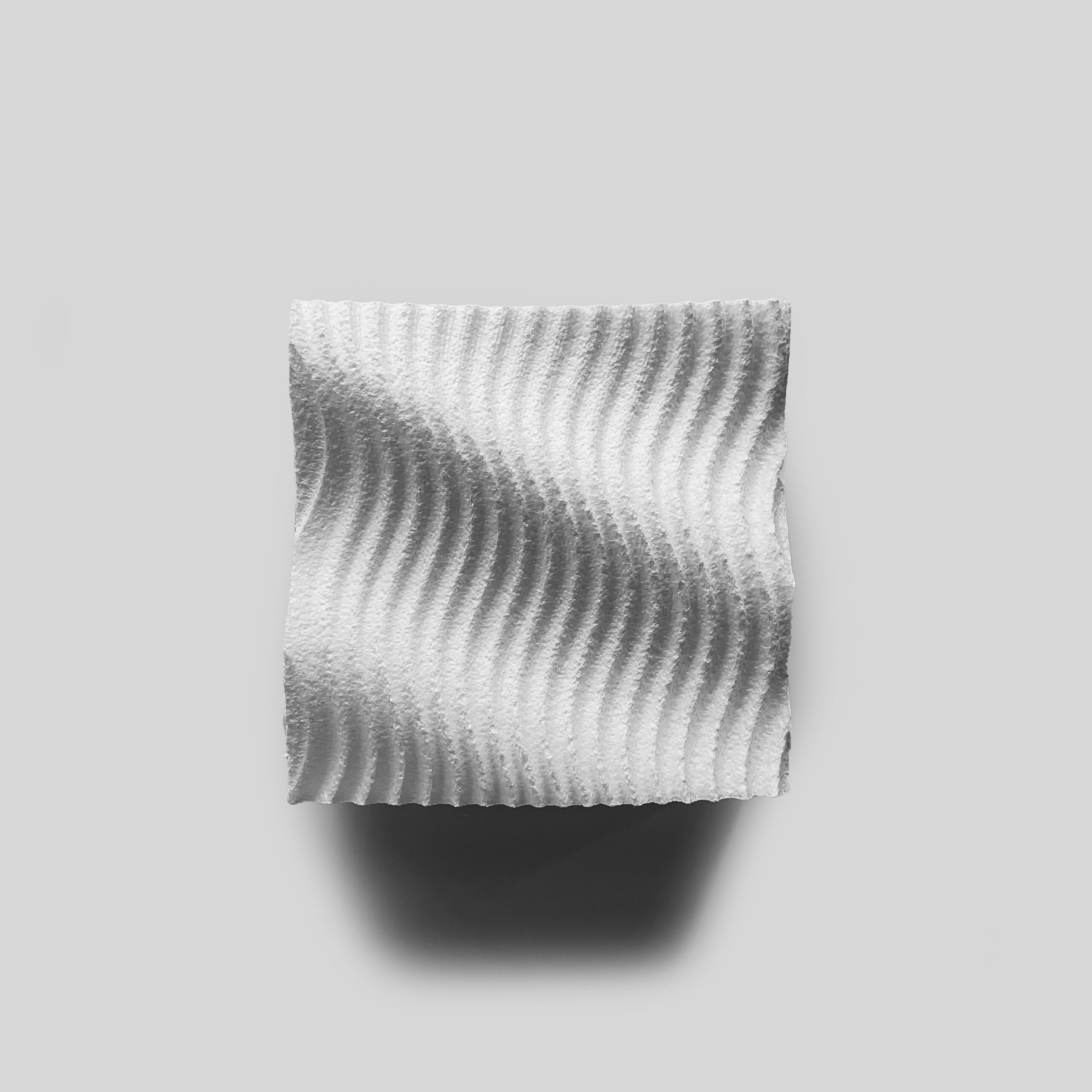
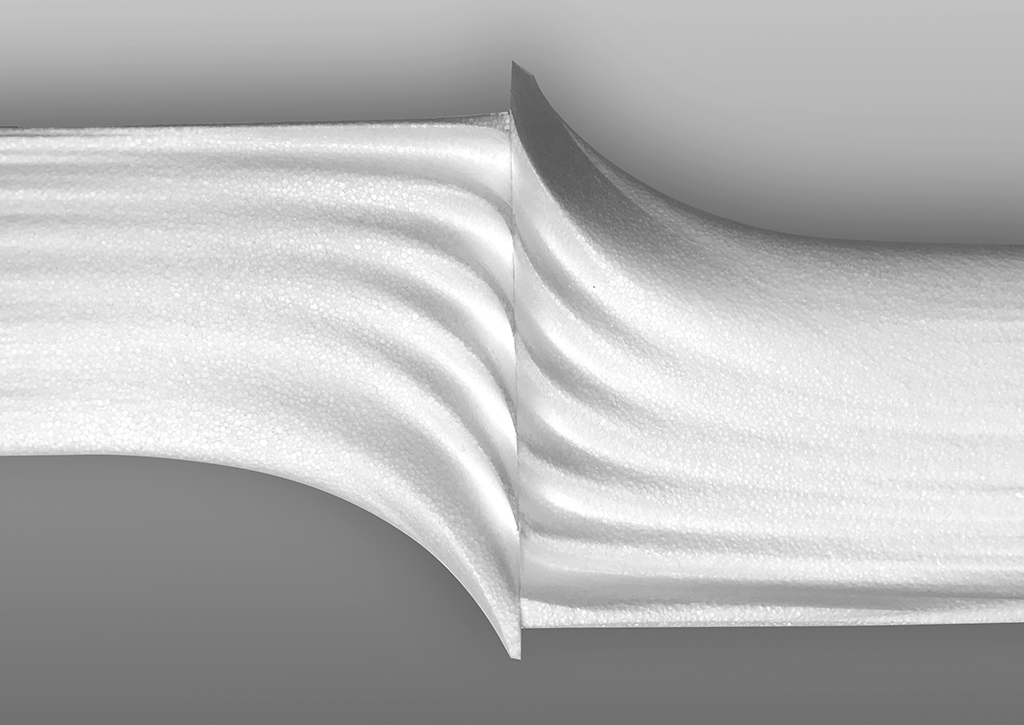
Styropor

Ton