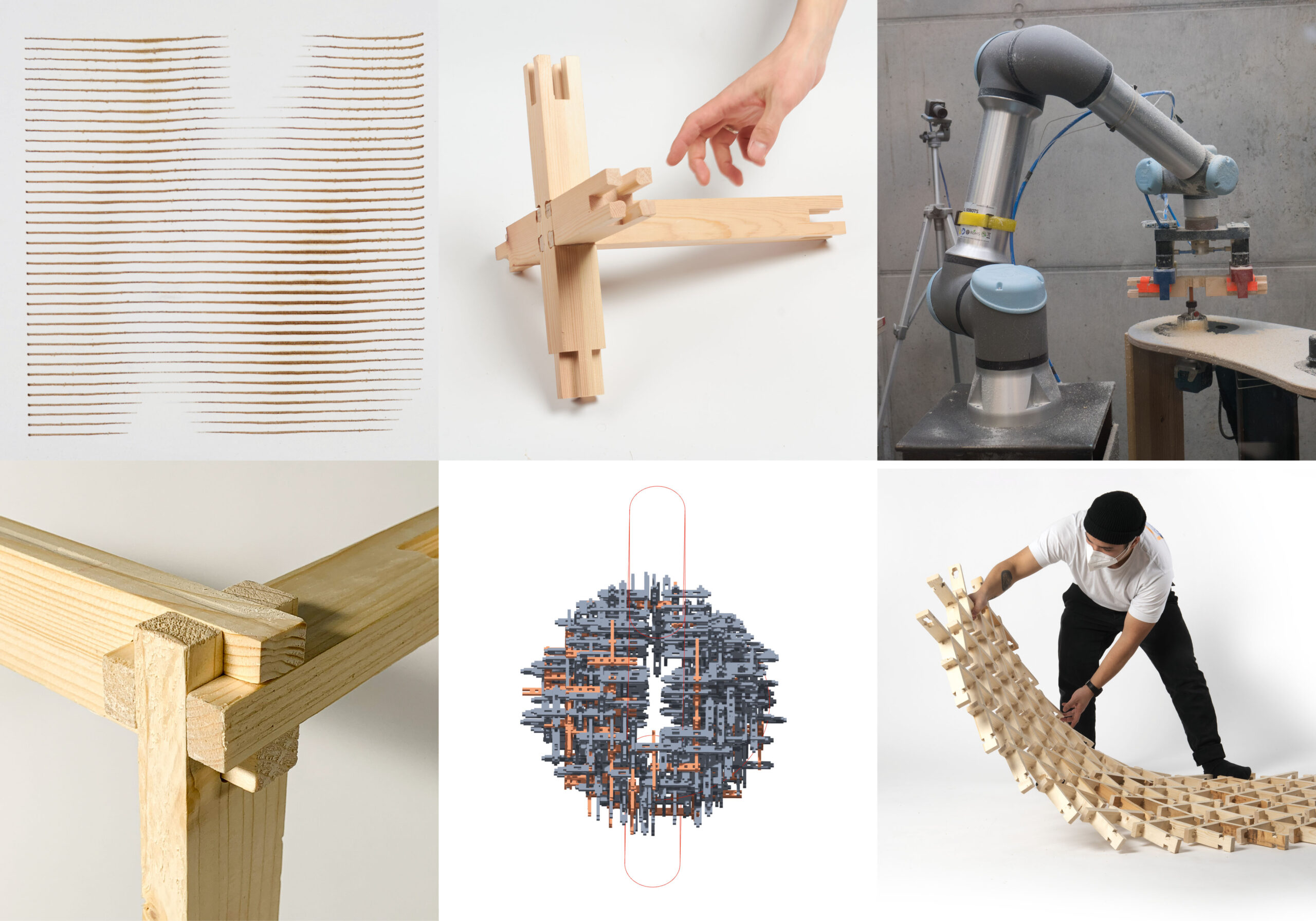
Frässtrukturen

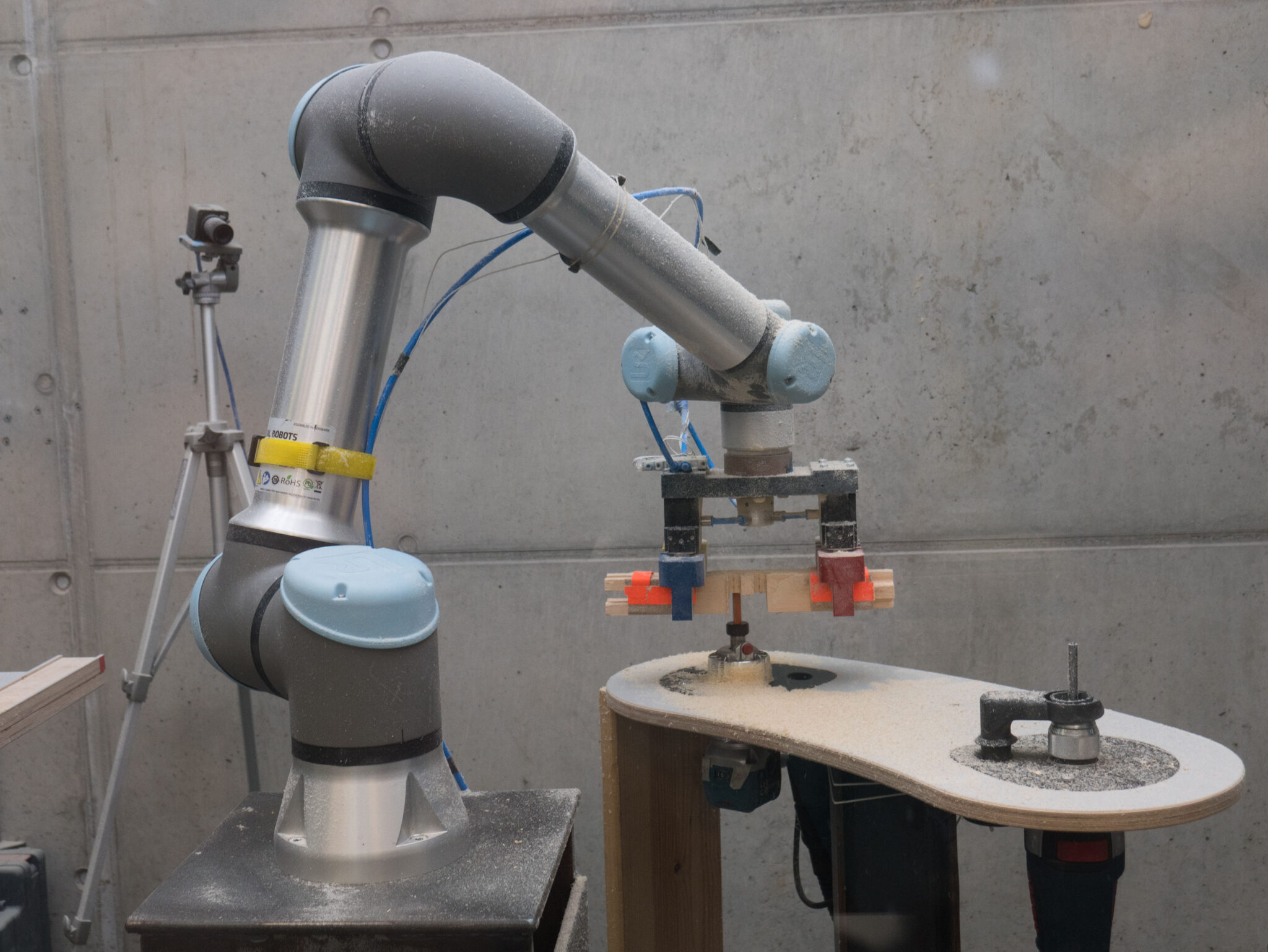
Holzverbindungen



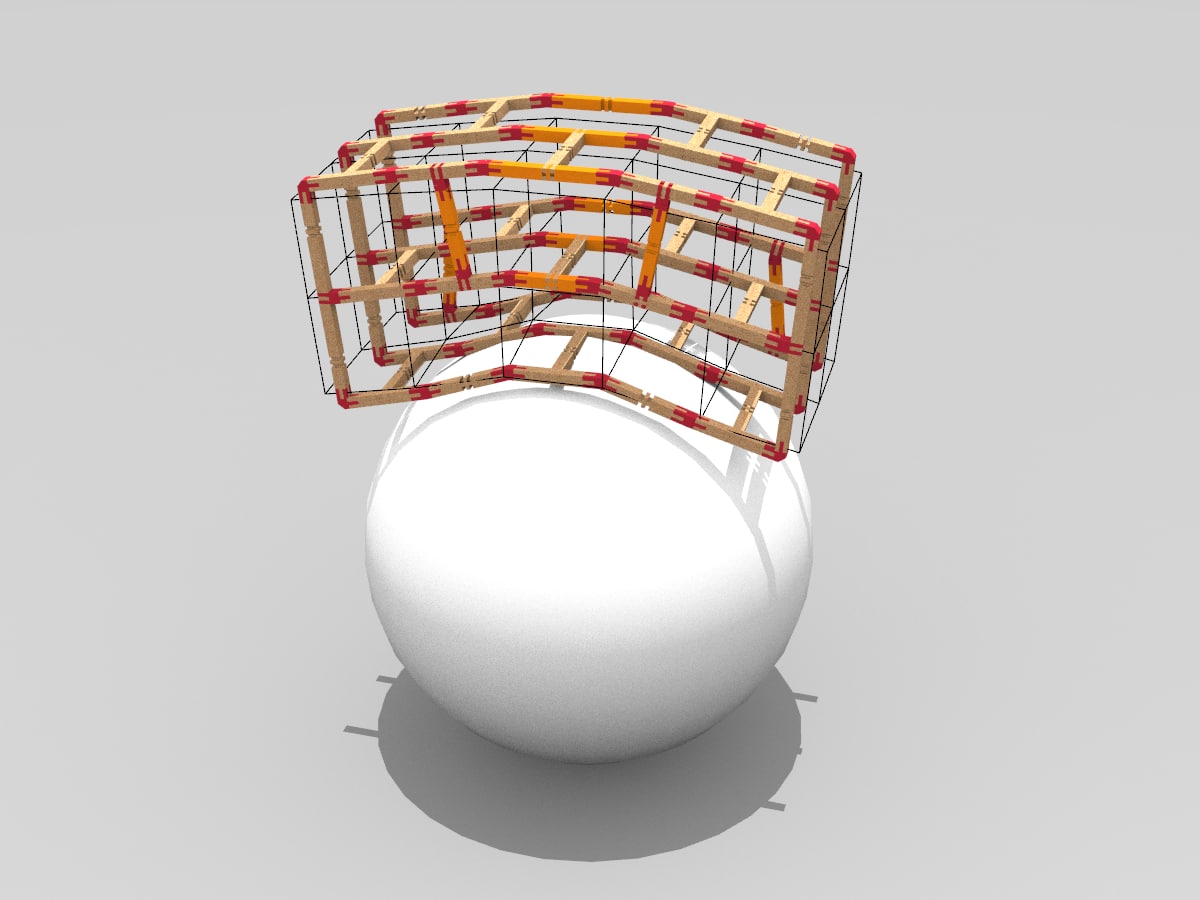
Generative Designkonzepte