In meiner Abschlussarbeit habe ich mich auf eine spannende Erkundung der Schnittstelle zwischen Tradition und Moderne in der Holzbearbeitung begeben. Mein Ziel war es, die Grenzen traditioneller Holzbiegeverfahren durch die Integration von Robotik und innovativen Ansätzen zu erweitern. Durch umfangreiche Recherchen und praktische Experimente wollte ich neue Möglichkeiten erschließen und die Grenzen dessen, was in diesem alten Handwerk erreicht werden kann, erweitern.
Um eine solide Grundlage für mein Projekt zu schaffen, habe ich mich intensiv mit der Geschichte und den Prinzipien des traditionellen Holzbiegens beschäftigt. Durch das Studium der Techniken, Anwendungen und Herausforderungen, mit denen Handwerker im Laufe der Geschichte konfrontiert waren, gewann ich wertvolle Einblicke in die Kunst und Wissenschaft der Holzformung. Dieses Verständnis war entscheidend für die Identifizierung von Bereichen, in denen Verbesserungen und Innovationen möglich waren.
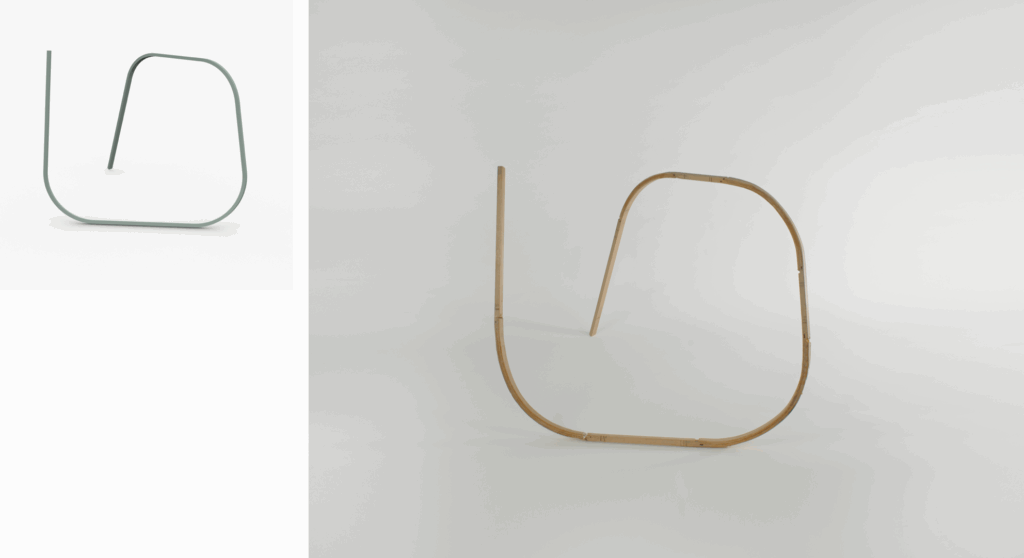
Inspiriert von verschiedenen Quellen wie Architektur und bildender Kunst suchte ich nach neuen Perspektiven und innovativen Ansätzen, um traditionelle Handwerkskunst zu verbessern. Während meiner Erkundungen entdeckte ich das Konzept des nicht unterstützten Biegens im Raum, eine Technik, die für ihre unvorhersehbaren und einzigartigen Ergebnisse bekannt ist, wenn sie von Hand ausgeführt wird. Fasziniert von ihrem Potenzial, wollte ich dieses Konzept mit Hilfe eines Roboterarms nutzen, um konsistente und wiederholbare Ergebnisse zu erzielen.
Mit dem Ziel, die Möglichkeiten des Holzbiegens zu erweitern, entwickelte ich ein digitales und physisches Werkzeug, das die Robotik nahtlos in den Prozess integrierte. Dieses Werkzeug ermöglichte es mir, das Holz präzise zu bearbeiten und zu kontrollieren, was neue Wege für Kreativität und Effizienz eröffnete. Der Roboterarm wurde zu einem Partner in meinen künstlerischen Bemühungen und bot mir die Möglichkeit, komplexe Krümmungen auszuführen und außergewöhnliche Ergebnisse zu erzielen.
Durch sorgfältige Experimente habe ich die Fähigkeiten des Roboterarms bei der Umsetzung von nicht unterstützten Biegungen getestet. Die Ergebnisse waren faszinierend und zeigten das Potenzial, traditionelle Holzbiegeverfahren über ihre herkömmlichen Grenzen hinaus zu erweitern. Der Roboterarm bot ein unvergleichliches Maß an Kontrolle und Präzision, wodurch komplexe und einzigartige Formen geschaffen werden konnten. Zum Abschluss meiner Dissertation bin ich voller Begeisterung für die Zukunft dieser bahnbrechenden Verschmelzung von Tradition und Technologie. Mit dem entwickelten Werkzeug besteht ein immenses Potenzial für die Herstellung nicht nur komplexer Möbelstrukturen, sondern auch großformatiger Konstruktionen. Durch den Einsatz mehrerer Roboterarme und die Weiterentwicklung des Werkzeugs stelle ich mir eine Zukunft vor, in der die Grenzen des Holzbiegens kontinuierlich erweitert werden und bemerkenswerte handwerkliche Leistungen ermöglicht werden.