Unkrautregulierung in der Landwirtschaft durch ein autonomes Robotiksystem
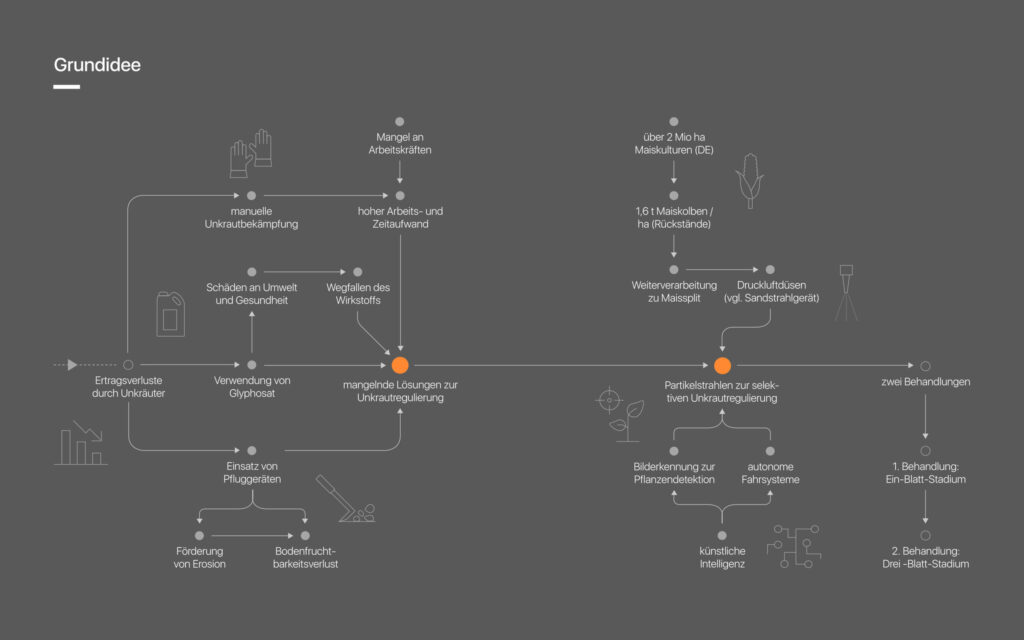
Unkrautregulierung stellt im komplexen Problemgeflecht der heutigen Landwirtschaft eine Schlüsselrolle dar. Sie kann als Ausgangsproblem für viele weitere Konflikte betrachtet werden, die sich in den kommenden Jahren noch weiter zu verschärfen drohen. Eine ökologische Lösung zur Unkrautregulierung, die gleichzeitig wirtschaftlich attraktiv ist, konnte bis heute noch nicht etabliert werden.
Die bisher kaum verbreitete Methode des Druckluftstrahlens von Splitpartikeln wurde in dieser Arbeit mit dem Einsatz von künstlicher Intelligenz verknüpft und weitergedacht. Die Verwendung von Pflanzendetektion erlaubt es, das Strahlen von Partikeln selektiv durchzuführen. So gewinnt diese Regulierungsmethode, die konventionellen Techniken gegenüber viele Vorteile hat, enorm an Effizienz.
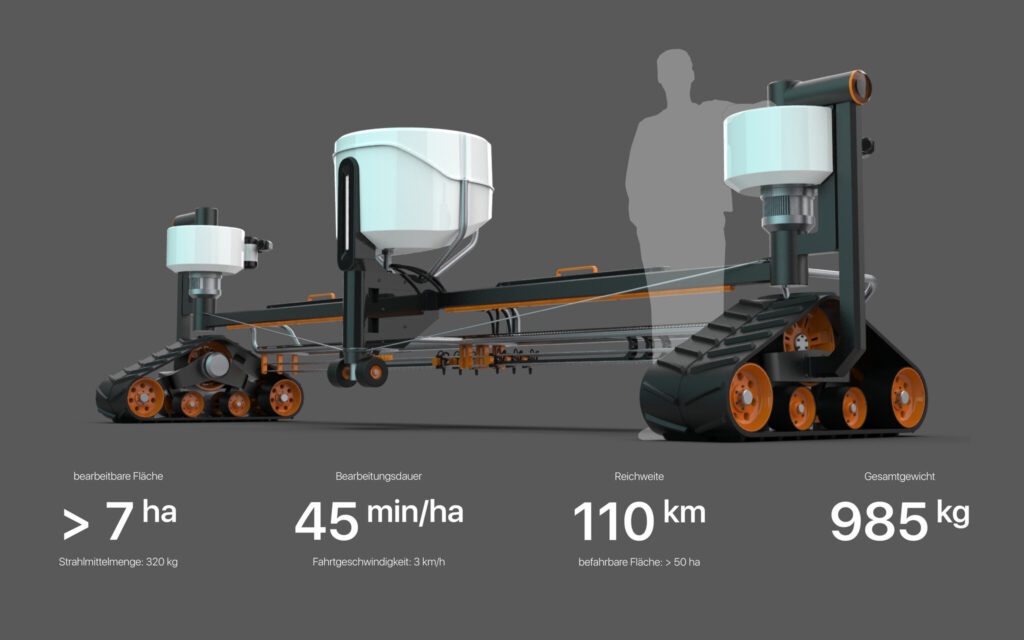
Das Ergebnis dieses Projekts ist ein Roboter, der durch seine leichte Bauweise und ein autonomes Fahrsystem die wichtigsten Vorzüge eines Agrarroboters aufweisen kann. Gleichzeitig verleiht die ungewöhnlich hohe Arbeitsbreite dem Roboter eine Flächenleistung, mit der er auch in konventionell arbeitenden Betrieben mithalten kann. Das Partikelstrahlen erlaubt eine wetterunabhängige und bodenschonende Behandlung, die gleichzeitig eine Verwertung von Rückstandsprodukten wie Maissplit inkludiert.
Masterarbeit 2020/2021 | Dennis Nogard
Betreuung: Prof. Nils Krüger, Prof. Dr. Jörg Petruschat